
What happened
On 23 April 2017, the pilot of a Robinson R44 Raven II helicopter, registered VH-SCM, conducted a short local charter flight from a helicopter landing site (HLS) on top of a boat at Talbot Bay, Western Australia (Figure 1). The pilot dropped off three passengers and then returned the helicopter alone to the boat. The pilot then remained seated in the helicopter, with the engine running, while two new passengers embarked. The helicopter’s doors had been removed previously.
At about 0940 Western Standard Time (WST), the helicopter lifted off from the boat rooftop HLS. The pilot conducted a descent from the HLS, which was about 20 ft above the water, to about 5 ft above the water and applied forward cyclic[1] so the helicopter would accelerate.
As the helicopter’s airspeed approached about 50 to 60 kt, the low rotor RPM warning horn sounded. The helicopter started to yaw[2] to the left and the pilot applied right pedal to correct the yaw. About 1 second later, the front of the helicopter skids collided with the water and the helicopter rolled over into the water.
The pilot and two passengers released their seatbelts and exited the helicopter underwater, but sustained minor injuries. After they exited the helicopter they inflated their lifejackets and swam about 50 m to shore.
Figure 1: Location of accident site

Source: Google earth – annotated by ATSB
Departure profile
The pilot commented that their intention, in accordance with the height-velocity curve (Figure 2) published in the aircraft’s pilot operating handbook, was to descend and remain in ground effect[3] until the helicopter had sufficient forward speed to achieve translational lift.[4]
The pilot reported rolling the cyclic and collective frictions off, ensuring the governor was on, rolling the throttle on until 102 per cent RPM was achieved, then lifting off into the hover, which was their normal lift-off procedure. The pilot then applied forward cyclic to accelerate the helicopter and descend from 20 ft to about 5–10 ft above the water level. The pilot was about to commence a climb (but had not yet raised collective[5] or applied aft cyclic) when the low rotor RPM warning horn sounded, indicating that the rotor RPM had reduced below 97 per cent. The helicopter struck the water about 300 m from the take-off site, at an airspeed the pilot estimated to be about 50 to 60 kt.
The pilot commented that although the helicopter was fitted with floats, they had no time to deploy them. The pilot and passengers were wearing life jackets, which they inflated after the helicopter collided with the water.
Figure 2: Robinson R44 II height-velocity curve
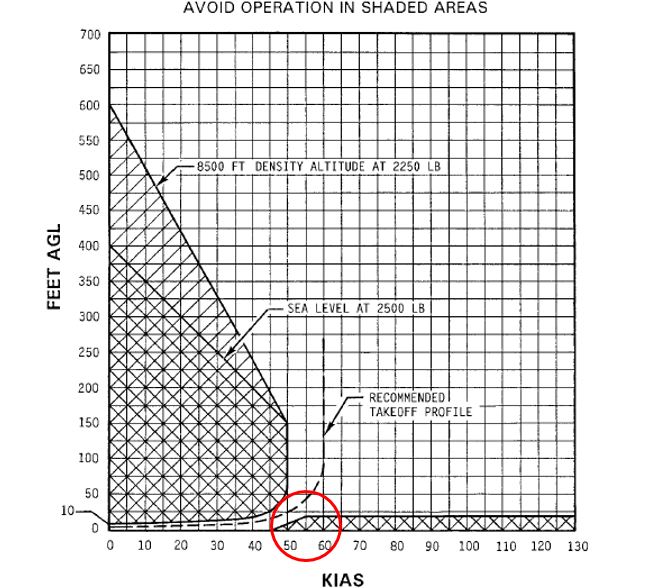
Source: Robinson R44 II Pilot’s operating handbook
Helicopter performance
The helicopter all up weight was 1,044 kg, which was 90 kg below the maximum take-off weight of 1,134 kg. At that weight, with the air temperature 33 °C, high relative humidity, nil wind and at sea level, the helicopter was within the performance limitations to hover both in and out of ground effect. The pilot had conducted the previous flight in the same way only minutes earlier with an additional passenger and the extra ten minutes of flight fuel on board, taking off in the same direction with nil wind, and had not had any issues with the helicopter’s performance.
The maximum manifold pressure (or engine power) available for the flight based on the conditions was 25.9 inches. The pilot reported setting about 23 to 24 inches.
Helicopter maintenance
The Civil Aviation Safety Authority reviewed the helicopter log books and did not identify any anomalies. The helicopter engine had five cylinders removed, repaired or replaced in the preceding 50.8 hours due to low compression and high oil consumption. The engine had a total time of 1,778.2 hours since new, with a time between overhaul of 2,000 hours for that model engine.
Safety analysis
The helicopter was below the published maximum take-off weight and within the published weight limits for hovering in and out of ground effect. In addition, the speed at which minimum power is required is about 55 kt for the R44 II, therefore the power required at the accident speed was less than the power required to hover. In the reported calm conditions, the helicopter should have had sufficient power available to maintain rotor RPM. The ATSB was unable to determine the cause of the RPM decay.
The take-off profile recommended by the manufacturer was for the helicopter to achieve a height of 25 ft at an airspeed of 50 kt. However, the helicopter was still at 5–10 ft at 50–60 kt, which provided the pilot with very little reaction time to the low rotor RPM warning.
The pilot reported that there was no outstanding maintenance on the maintenance release (which was not retrieved from the helicopter) and that the helicopter had been running normally on the previous flight only minutes before the accident flight. As the helicopter had not been recovered from the water at the time of the ATSB investigation, no inspection of the engine had occurred.
The helicopter had recently undergone significant engine maintenance, mostly working on the cylinders, and was using more oil than normal, but not an abnormal amount for a running-in period. The pilot had topped up the oil prior to the first flight of the day. The pilot did not observe any warnings after the low rotor RPM horn sounded, but there was very little time before the helicopter collided with the water. The pilot commented that even a small drop in engine performance, such as from a magneto failure, would have been difficult to recover from at 5–10 ft above the water.
The pilot commented that as there was no wind, the water surface was glassy and they may not have been able to assess the height of the helicopter above the surface accurately. Operating at an estimated 5 ft above the water did not allow time to react in case of an engine failure or temporary reduction in performance.
Findings
These findings should not be read as apportioning blame or liability to any particular organisation or individual.
- The rotor RPM decayed below 97 per cent at 5–10 ft above the water and the pilot was unable to recover control of the helicopter, resulting in a collision with the water.
- The helicopter was below maximum take-off weight and had sufficient power to hover in and out of ground effect with the engine operating normally.
Safety message
According to the FAA rotorcraft handbook, pilots should avoid the low altitude, high airspeed portion of the height-velocity diagram, because their ‘recognition of an engine failure will most likely coincide with, or shortly occur after, ground contact. Even if you detect an engine failure, there may not be sufficient time to rotate the helicopter from a nose low, high airspeed attitude to one suitable for slowing, then landing.’
Robinson Helicopter Company Safety Notice SN-19, Flying low over water is very hazardous, stated that ‘Many pilots do not realize their loss of depth perception when flying over water.’
Purpose of safety investigationsThe objective of a safety investigation is to enhance transport safety. This is done through:
It is not a function of the ATSB to apportion blame or provide a means for determining liability. At the same time, an investigation report must include factual material of sufficient weight to support the analysis and findings. At all times the ATSB endeavours to balance the use of material that could imply adverse comment with the need to properly explain what happened, and why, in a fair and unbiased manner. The ATSB does not investigate for the purpose of taking administrative, regulatory or criminal action. TerminologyAn explanation of terminology used in ATSB investigation reports is available here. This includes terms such as occurrence, contributing factor, other factor that increased risk, and safety issue. Publishing informationReleased in accordance with section 25 of the Transport Safety Investigation Act 2003 Published by: Australian Transport Safety Bureau © Commonwealth of Australia 2017
Ownership of intellectual property rights in this publication Unless otherwise noted, copyright (and any other intellectual property rights, if any) in this report publication is owned by the Commonwealth of Australia. Creative Commons licence With the exception of the Coat of Arms, ATSB logo, and photos and graphics in which a third party holds copyright, this publication is licensed under a Creative Commons Attribution 3.0 Australia licence. Creative Commons Attribution 3.0 Australia Licence is a standard form licence agreement that allows you to copy, distribute, transmit and adapt this publication provided that you attribute the work. The ATSB’s preference is that you attribute this publication (and any material sourced from it) using the following wording: Source: Australian Transport Safety Bureau Copyright in material obtained from other agencies, private individuals or organisations, belongs to those agencies, individuals or organisations. Where you wish to use their material, you will need to contact them directly. |
__________
- The cyclic pitch control, or cyclic, is a primary flight control that allows the pilot to fly the helicopter in any direction of travel: forward, rearward, left, and right.
- Term used to describe motion of an aircraft about its vertical or normal axis.
- When hovering within about one rotor diameter of the ground, the performance of the main rotor is affected by ground effect. A helicopter hovering in-ground-effect (IGE) requires less engine power to hover than a helicopter hovering out-of-ground-effect (OGE).
- Translational lift occurs when clear, undisturbed air, flows through the rotor system from wind or forward speed.
- Collective: a primary helicopter flight control that simultaneously affects the pitch of all blades of a lifting rotor. Collective input is the main control for vertical velocity.
This report was published as part of the Aviation Short Investigations Bulletin Issue 61