
What happened
On 3 September 2015, several multi-engine turboprop aircraft converged on the airspace above Mount Hotham Airport, Victoria, as part of a multi-day charter involving several operators. While conducting a number of area navigation (RNAV) Global Navigation Satellite System (GNSS) approaches, the pilot of a participating Beech Aircraft Corp B200 (King Air) aircraft, registered VH‑OWN, descended the aircraft below the minimum altitude and exceeded the tracking tolerance of the approach after experiencing GPS/autopilot difficulties. The pilot twice climbed the aircraft without following the prescribed missed approach procedure and manoeuvred in the Mount Hotham area. During this manoeuvring, the aircraft came into close proximity to another King Air, registered VH‑LQR, which had commenced the same approach. Both aircraft were in instrument meteorological conditions and unable to sight each other. Significant manoeuvring was also observed as VH‑OWN was on final approach to the Mount Hotham runway. All aircraft landed safely at Mount Hotham without injury to passengers or crew.
What the ATSB found
Difficulties in operating the GPS/autopilot resulted in the pilot of VH‑OWN experiencing an unexpected reduction in the level of supporting flight automation, and a significant increase in workload, while attempting to conduct RNAV (GNSS) approaches into Mount Hotham Airport. This increased workload affected both the pilot’s ability to follow established tracks such as the published approach and missed approach, and his ability to communicate his position accurately to other aircraft and the air traffic controller.
Although radar coverage in the area was limited, there were opportunities for the air traffic controller to identify when VH‑OWN was having tracking difficulties during all three approaches, and when VH‑OWN tracked towards the expected position of VH‑LQR. However, this position information was not effectively communicated, resulting in a missed opportunity to prevent a potential controlled flight into terrain and/or collision with VH‑LQR.
What's been done as a result
The pilot of VH‑OWN underwent flight testing by both a delegate of the Civil Aviation Safety Authority (CASA), and by a flying operations inspector employed by CASA, who recommended remedial training. Independent of this investigation, in February 2017 it became mandatory for all aircraft operating under instrument flight rules to be fitted with Automatic Dependence Surveillance – Broadcast, further increasing surveillance capability nationally, including in the Mount Hotham area.
Additionally, and independent of this investigation, the Department of Defence radar system, capable of surveillance in the Mount Hotham area, is scheduled for upgrade in late 2018. The radar system upgrade is likely to enhance the national air traffic system through the increased compatibility between that radar and the Airservices Australia surveillance system.
Safety message
Maintaining the pilot skill of operating an aircraft without the use of automation is essential in providing redundancy should the available automation be unexpectedly reduced. Additionally, as the responsibility for separation from other airspace users and terrain in Class G airspace lies with aircrew, it is imperative that pilots maintain the skills to navigate accurately, and interpret and utilise traffic information to maintain safe separation. From an air traffic control perspective, the occurrence highlights the safety benefit of communicating any apparent tracking anomalies and/or conflicts to the involved pilots.
Mount Hotham runway

Source: Mount Hotham Airport and Resort
At about 0825 Eastern Standard Time[1] on 3 September 2015, five low‑capacity twin‑engine turboprop aircraft flew from differing originating aerodromes towards Mount Hotham Airport, Victoria, (Mount Hotham) as part of a passenger charter involving a number of different operators. As the weather on arrival at Mount Hotham was below that required for a visual approach, the aircraft needed to carry out the published area navigation (RNAV) Global Navigation Satellite System (GNSS) instrument approach (see the section titled RNAV (GNSS) approach design) in order to navigate clear of cloud before landing.
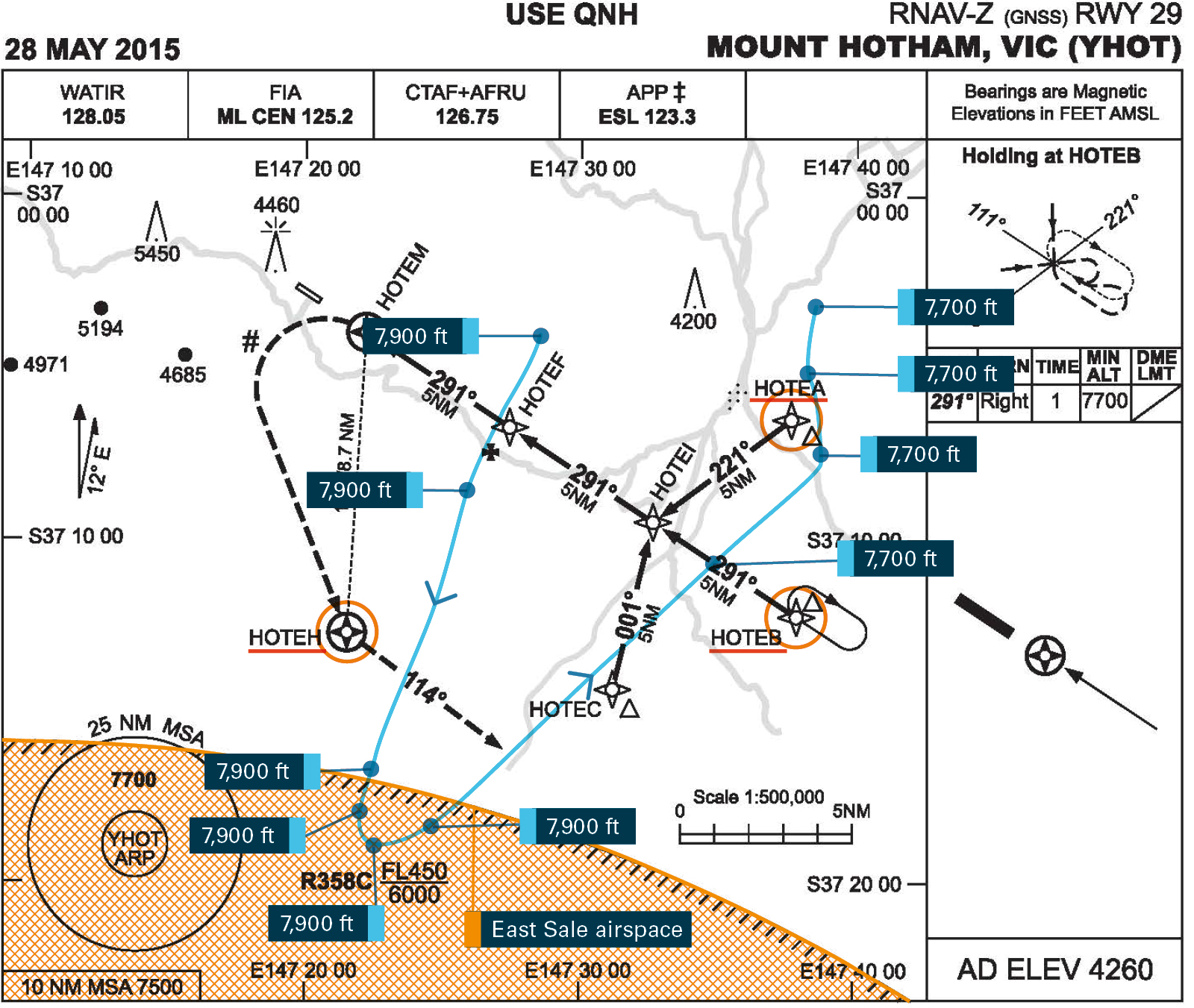
The first aircraft to arrive in the Mount Hotham area was a Beech Aircraft Corp B200 King Air (King Air), registered VH‑OWN (OWN). At about 0829, the pilot of OWN commenced the RNAV (GNSS) approach for runway 29[2] from the south via the initial approach fix (IAF) waypoint HOTEC (EC)[3] using the autopilot, but experienced tracking difficulties on reaching the intermediate fix waypoint HOTEI (EI) (Figure 1).
Radar data showed that from EC to EI, OWN descended to 7,300 ft, 400 ft below the minimum permitted safe altitude. At 0830 the aircraft did not turn to intercept the inbound approach track at EI, but instead continued tracking to the north of the prescribed approach path and continued to descend to 6,300 ft. In response to the tracking difficulties, the pilot eventually discontinued the approach.
The pilot then climbed the aircraft to the minimum safe altitude of 7,700 ft while still tracking towards the north, rather than via the prescribed missed approach track. At 0834, the pilot of OWN advised the air traffic controller (controller) that he was in the missed approach, and commenced manoeuvring in the airspace in the Mount Hotham area, as the other charter aircraft progressively arrived for the RNAV (GNSS) approach for runway 29 (Figure 2).
Due to surveillance limitations to the north of Mount Hotham, surveillance data for OWN was not available to the controller from 0832 to 0838. During that time, the aircraft tracked from the east of Mount Hotham at 6,400 ft, to a position about 4 NM (7 km) east of the airfield at 7,900 ft. At 0838, the aircraft’s position did not match the pilot’s reported tracking details, though the controller did not comment on the erroneous tracking when providing the pilot with position information.
Figure 1: Partial radar data for the first approach conducted by VH‑OWN

VH‑OWN’s track overlaid on the RNAV (GNSS) approach chart for Mount Hotham. Source: Airservices Australia, annotations by the ATSB
The second aircraft, also a King Air, arrived at Mount Hotham on the same track as OWN, commencing the approach at 0841 as the pilot of OWN reported that he would track to waypoint HOTEB (EB) and hold. The pilot of that aircraft conducted the RNAV (GNSS) approach from waypoint EC and landed on runway 29 at about 0846, having become visual with the ground close to the approach minimum altitude (741 ft above the runway).
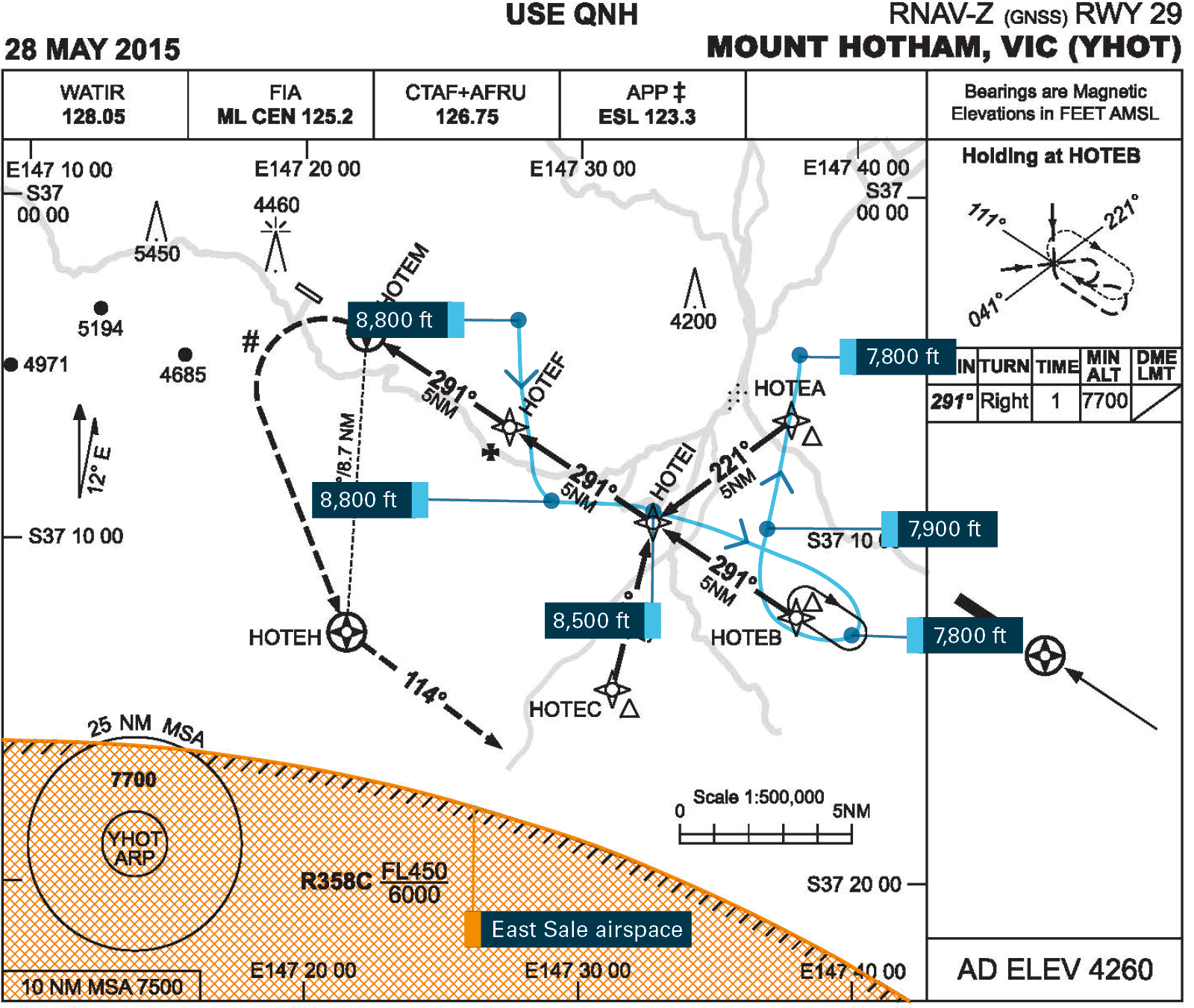
Figure 2: Partial radar data for the second approach conducted by VH‑OWN
VH‑OWN’s track overlaid on the RNAV (GNSS) approach chart for Mount Hotham. Source: Airservices Australia, annotations by the ATSB
Shortly after the pilot of OWN reported tracking for EB, the pilot of another aircraft tracking for Mount Hotham advised him on the area radio frequency that they were trying to talk to him on the Common Traffic Advisory Frequency (CTAF) (see the section titled Airspace and air traffic services).[4] The CTAF at Mount Hotham was not recorded, nor was it monitored by air traffic control.
The third aircraft to commence the approach was another King Air, registered VH‑LQR (LQR). On receiving advice from the pilot of OWN on the CTAF that he was to the west of Mount Hotham (see the section titled Traffic separation and collision avoidance in Class G), the pilot of LQR tracked inbound from the north-east on descent to 7,700 ft to commence the approach at the IAF HOTEA (EA). It was reported that subsequent broadcasts from the pilot of OWN on the CTAF indicated that the pilot was unsure of his position. Consequently, the pilot of LQR stopped descent at 8,000 ft while still to the north of EA.
At 0848, the controller attempted to contact the pilot of OWN and, when not successful, advised the pilot of LQR that OWN was going to conduct an approach in front of LQR. This information was surmised by the controller from the observed track of OWN. The pilot of LQR advised the controller that he believed the pilot of OWN was ‘on the approach’ but he was unable to contact him. Shortly afterwards, the pilot of LQR advised the controller that OWN was ‘turning inbound at EB for the approach’. However, surveillance data showed that, at that time, OWN was just to the south of EI at 7,700 ft tracking in a north-easterly direction.
From 0849, when LQR was about 18 NM (33 km) north of EA at flight level (FL) 141[5] to 0854 when the aircraft was about 1 NM (2 km) north of EA at 8,200 ft, surveillance data for LQR was not available to the controller. Surveillance data remained available for OWN during that period that showed the aircraft tracked to the east of EI and towards EA at 7,700 ft.
Figure 3: Radar data showing the near-collision between VH‑OWN and VH‑LQR
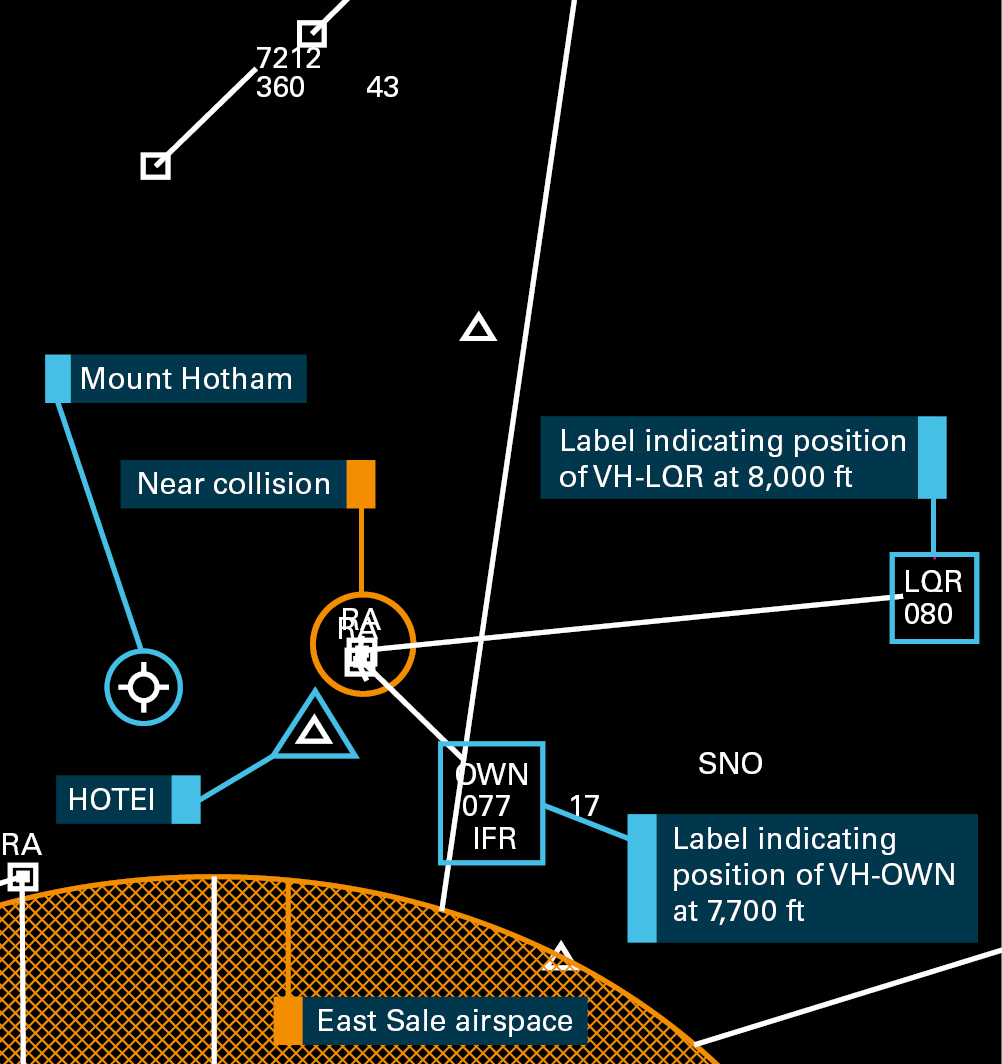
Department of Defence radar data showing the near-collision between VH‑OWN and VH‑LQR. This information was not available to the Airservices Australia air traffic controller. Source: Department of Defence, annotations by the ATSB
Although not available on the controller’s surveillance display, data from the Department of Defence radar to the south of Mount Hotham at East Sale, Victoria, showed that OWN passed 300 ft below LQR, just north of EA at 0853 (Figure 3).
The pilot of OWN then attempted another approach (Figure 4) and experienced similar tracking difficulties. Radar data shows that the pilot again continued to descend to the north of the RNAV (GNSS) approach track to 5,800 ft, with the pilot later stating that he became visual and clear of cloud during the descent. The aircraft was then observed to carry out significant manoeuvring close to the ground while establishing the aircraft on short final to the runway before landing at about 0918.
All the involved aircraft were equipped with at least two independent communication radios, enabling the pilots to remain on the controller’s area frequency while also communicating with those in the other aircraft on the CTAF. During this time, none of the pilots reported transferring to the CTAF, and a number of pilots continued to make position reports to the controller, and to request updates on the location of other aircraft in the area, as well as advising tracking details.
Figure 4: Partial radar data for the third approach conducted by VH‑OWN overlaid on the RNAV (GNSS) approach chart for Mount Hotham.
VH‑OWN’s track overlaid on the RNAV (GNSS) approach chart for Mount Hotham. Source: Airservices Australia, annotations by the ATSB
The following day, the pilot of OWN, along with a Civil Aviation Safety Authority (CASA)‑approved testing officer, conducted a test flight in OWN which included a practice area navigation RNAV (GNSS) approach in daylight visual meteorological conditions. While the aircraft reportedly did demonstrate a minor tracking anomaly when approaching the final approach fix, this did not replicate the situation of the previous day. Further opportunity to test-fly the aircraft and/or the GPS was hampered when the pilot of OWN destroyed the GPS removable data card before the ATSB had commenced an investigation, making it impossible to replicate the conditions of the occurrence flight. This action was taken after the pilot was reportedly told the data card was likely corrupted.
The pilot of OWN voluntarily suspended RNAV (GNSS) operations until he could undergo independent flight testing by CASA. This testing by CASA then resulted in a recommendation that the pilot complete remedial training before undergoing a further flight test. Following the second flight test, the pilot was deemed proficient and competent to resume operations. At no time during the two test flights were any anomalies with the GPS and/or autopilot recorded by either the occurrence pilot or the CASA-approved testing officers. CASA, however, advised that no formal testing of the aircraft or its equipment was conducted during those two flights beyond observation of functionality.
__________
- Eastern Standard Time (EST) was Coordinated Universal Time (UTC) + 10 hours.
- Runway number: the number represents the magnetic heading of the runway.
- There are generally five waypoints in Australian RNAV (GNSS) approaches. These waypoints usually have five alphanumeric characters which in Australia always consist of five letters. The first four letters of each waypoint remain the same within an approach, and represent the three letter aerodrome identifier (e.g. HOT for Mount Hotham), and the direction from which the aircraft has travelled during the final approach (e.g. in this approach E for east). Only the fifth letter in the waypoint name varies to identify which waypoint the aircraft is approaching.
- The Common Traffic Advisory Frequency (CTAF): A designated frequency on which pilots make positional broadcasts when operating in the vicinity of a non-controlled aerodrome.
- Flight level: At altitudes above 10,000 ft in Australia, an aircraft’s height above mean sea level is referred to as a flight level (FL). FL 141 equates to 14,100 ft
Mount Hotham Airport
Mount Hotham Airport (Mount Hotham) is a certified aerodrome equipped with a sealed east-west runway, a passenger terminal and an aircraft parking apron adjacent to the runway. Located in the Victorian Alps at an elevation of approximately 4,300 ft above mean sea level, it is the highest certified aerodrome in Australia and is surrounded by mountainous terrain. The airport is not equipped with a control tower or air traffic control facilities and does not have ground-based navigation aids.[6] Approaches during weather conditions below those required for visual flight utilise a single area navigation (RNAV) Global Navigation Satellite System (GNSS) approach aligned with runway 29. The airport operator was a certified meteorological observer and weather observations were available on request, however many routine meteorological services associated with larger certified aerodromes were not available.
Airspace and air traffic services
The airspace above Mount Hotham is designated as Class G (uncontrolled) from the surface to Flight Level 180. In Class G airspace, pilots are responsible for separation from other airspace users and from terrain (see the section titled Traffic separation and collision avoidance in Class G).
To assist pilots to organise their own separation from other airspace users, some airports have been allocated a Common Traffic Advisory Frequency (CTAF). Pilots broadcast their position and intentions on the CTAF, enabling other pilots to identify them as a possible conflict and to manage their separation accordingly. Additionally, IFR aircraft in Class G airspace are provided with a traffic information service by an Airservices Australia (Airservices) air traffic controller (controller) about conflicting IFR and observed visual flight rules aircraft. The traffic information is based on pilot reports and, where coverage exists, air traffic service (ATS) surveillance data. The obligation to provide the traffic information ceases when the pilot reports changing to the CTAF.
To the south of Mount Hotham is East Sale airspace,[7] which falls under the jurisdiction of Department of Defence (Defence) controllers. Due to the location of Mount Hotham and the surrounding terrain, radar coverage of the area from Airservices equipment was limited to about 6,000 ft above mean sea level to the south and on the approach to Mount Hotham and to about 10,000 ft to the north of the airport. Defence radar coverage, however, was available above about 5,000 ft. At the time, Airservices did integrate some of the data from the East Sale radar, but due to an incompatibility between the systems, Defence radar data for the area to the north of Mount Hotham was not incorporated into the Airservices system.
The Civil Aviation Safety Authority (CASA) mandated the fitment and use of Automatic Dependant Surveillance Broadcast (ADS-B)[8] for all IFR flights in Australia from early 2017. At the time of this occurrence, however, the aircraft involved were not fitted with ADS-B, nor was it required.
The provision of a traffic information service is limited by the information available to the controller and the means available to pass that information to pilots. As each aircraft tracked towards Mount Hotham, the responsible controller provided a traffic information service in relation to aircraft in the vicinity. The controller also updated aircraft already in the vicinity of Mount Hotham of further aircraft entering that airspace. Once the aircraft began manoeuvring below 10,000 ft in the vicinity of Mount Hotham, including when conducting the approach, the controller could not always see them on their surveillance display. As such, a continuous surveillance service was not possible. None of the involved aircraft reported switching to the CTAF, resulting in radio communications occurring on both the CTAF and area frequencies. Additionally, as they were all operating under the IFR, there was still an obligation for the controller to provide a traffic information service.
The Airservices surveillance system incorporates a number of warnings and alerts to assist in the provision of an ATS. One of these, the Short Term Conflict Alert (STCA), provides advance warning to a controller that aircraft may be in conflict within the next 90 seconds. To operate, the STCA requires surveillance data on the aircraft involved. As there was limited surveillance data of the developing proximity event to the north of Mount Hotham, the STCA did not activate. In the event of a STCA activation, controllers are only able to provide an alert on the area radio frequency, not the CTAF
Pilots are assisted with separation from terrain around some airports in Class G airspace by the design of instrument approaches that include a minimum safe altitude in the vicinity of the airport. The instrument approach chart for Mount Hotham, the RNAV (GNSS) approach to runway 29, has a commencement height of not below 7,700 ft which is also the minimum safe altitude within 25 NM (46 km) of the Airport. The chart also notes that the Airport is 4,260 ft above mean sea level and displays a number of obstacles in the vicinity. These include a 4,200 ft obstacle to the north, and two obstacles to the west at 4,460 ft and 5,450 ft. Descent below 7,700 ft in the vicinity of Mount Hotham when not established on the RNAV (GNSS) approach reduces the safety margin for aircraft operating in instrument meteorological conditions.
Traffic separation and collision avoidance in Class G
The accurate provision and interpretation of traffic information is essential to enable pilots to separate their aircraft from other airspace users in Class G airspace. This allows pilots to accurately assess and respond to another aircraft’s position relative to their aircraft. During times of restricted visibility in uncontrolled airspace, aircraft separation is achieved by pilots broadcasting their position information and listening for and interpreting the position reports of other pilots. Additionally, as discussed above, a traffic information service is provided to the pilots of IFR flights and is also available on request to pilots of VFR aircraft, subject to controller workload. The timeliness and accuracy of traffic information broadcasts, including accurate position information and pilot intentions, is therefore pivotal in assuring adequate separation.
Prescribed traffic patterns such as air routes, mandatory approach and missed approach tracks and holding patterns also assist pilots in describing and interpreting an aircraft’s position relative to that traffic pattern (e.g. the aircraft is on the outbound leg of the holding pattern). It is mandatory for pilots flying in instrument metrological conditions to track via the prescribed missed approach procedure when aborting an approach in Class G airspace, unless a higher emergency exists.
Airspace risk management
The airspace above Mount Hotham Airport is classified as Class G from ground level to FL180. Above that sits Class E airspace from FL180 to FL245. The Australian Airspace Policy Statement (AAPS), published on 13 July 2015 and pursuant under the Airspace Act 2007, provides guidance to CASA on the administration of airspace. As stated previously, Class G airspace permits both IFR and VFR aircraft and they both receive a flight information service which includes directed traffic information to IFR flights on other IFR flights and known VFR flights. Class E airspace permits IFR and VFR flights however, IFR flights are provided with an ATC service and are separated from other IFR flights and receive traffic information on VFR flights as far as is practicable. VFR flights are provided with a flight information service, which includes traffic information, as far as is practicable.
The AAPS also determines when changes to airspace classification may be required in the airspace immediately around an aerodrome. Criteria on the annual passenger transport operations aircraft movements, the annual number of passengers and total annual aircraft movements must be met before a determination on the level of change can be made. The criteria numbers for Mount Hotham were substantially lower than what is required and as such Class G has been deemed as an appropriate classification.
The AAPS did not preclude CASA from examining the requirement for airspace changes should CASA consider such examination was required, for example, on risk or safety grounds.
Under the Airspace Regulations 2007, CASA is responsible for ensuring that the airspace architecture is appropriate for users and administrators and this is achieved through a review programme. The programme is cyclic and aims to review the entire Australian airspace architecture every 5 years.
At the time of this incident there had been no recent review of the airspace in the vicinity of the Mount Hotham Airport. However, an airspace review was completed in December 2011 on the airspace sectors that encompassed Mount Hotham Airport. The collision probability at numerous aerodromes within the review area was ascertained and utilised the CASA Office of Airspace Regulation Airspace Risk Model. Using that model, the risk was assessed as 3.38 x 10-6 for Mount Hotham. An airspace assessment for the entire area was also estimated at 1.39 x 10-4, which equated to about one collision every 7,200 years per airport.
The findings/conclusions for the review found that, based on analysis of data and received feedback, the airspace classification and hence air traffic services for those airspaces, within the review area were suitable.
Aircraft equipment
In addition to other flight guidance instruments, VH‑OWN (OWN) was equipped with a single certified GPS capable of conducting IFR enroute navigation and non-precision approach procedures.[9] The installation consisted of the Garmin GPS 155 receiver display unit (RDU), an external antenna, an annunciation control unit and the horizontal situation indicator (HSI).[10] The RDU received and processed signals from up to 12 GPS satellites to determine the aircraft’s position, altitude and time. Software within the unit provided information to the pilot for navigating the aircraft through a series of earth-referenced waypoints. The RDU, horizontal situation indicator and annunciator control unit were located on the instrument panel (Figure 5).
Figure 5: Cockpit instrument layout of VH‑OWN
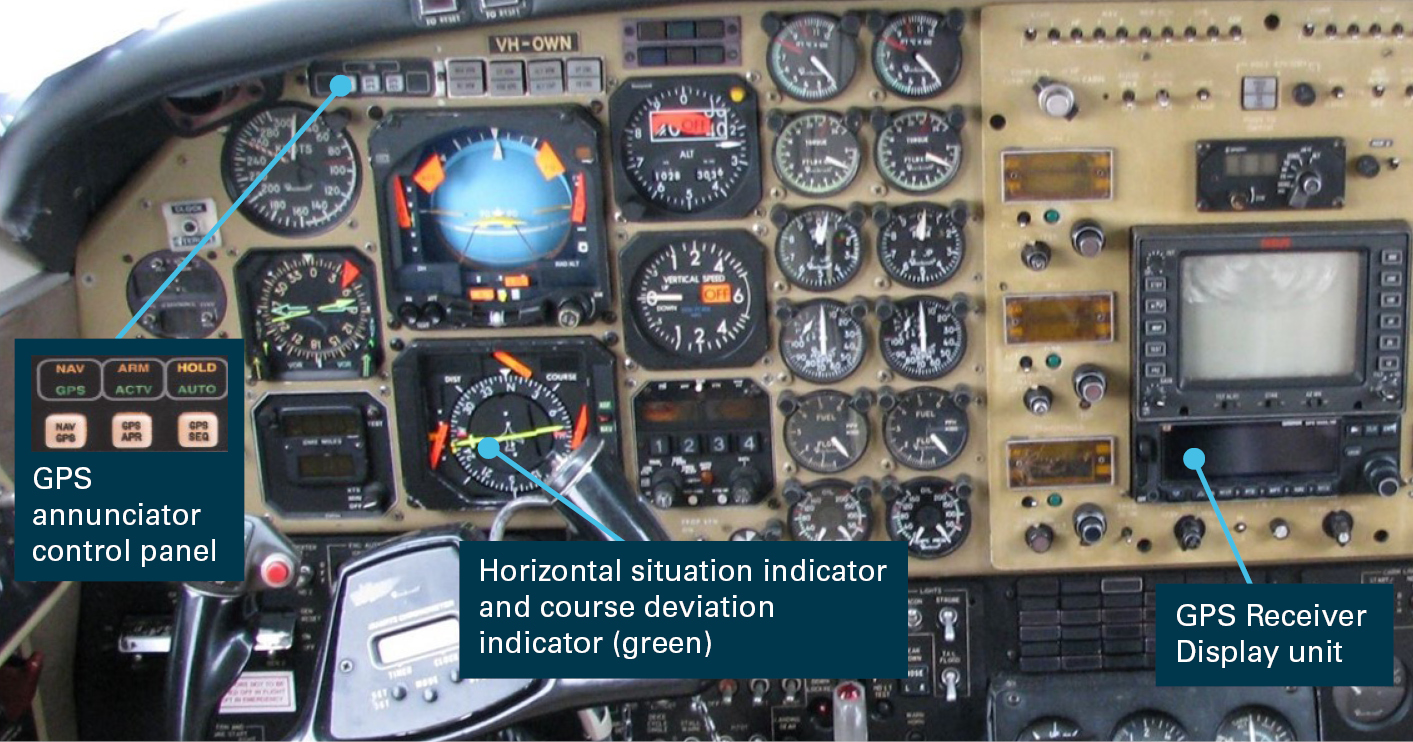
The image depicts the aircraft on the ground with no power to the systems, and the insert of the expanded GPS annunciator panel is representative of the one installed in the aircraft. Source: ATSB
Receiver display unit and horizontal situation indicator
The navigation information was presented on the RDU in various user-selectable forms on a liquid crystal display. This information included groundspeed, aircraft track, distance, bearing and time to the next waypoint, and a graphical course deviation indicator (CDI). Selection of navigation data and presentation of the navigation information was controlled by the pilot using function keys and rotary knobs on the face of the unit. The display also presented various messages regarding the navigation mode and operational status of the receiver.
The pilot’s HSI could present course deviation indications based on information derived from the GPS receiver. When GPS was selected for display on the HSI, the CDI reflected the same graphical CDI displayed on the RDU.
Waypoint coordinates for RNAV (GNSS) non-precision approaches were stored in a navigation database on a data card, similar to a computer flash memory card. The data card was inserted into the RDU, and the data card waypoint coordinates could not be edited by the pilot. Jeppesen[11] provided an updated database for the GPS receiver every 28 days.
Annunciator control unit
The annunciation control unit was a combined annunciation and switching unit that allowed the pilot to:
- select the navigation source between GPS or ground-based VHF navigation aids for presentation on the HSI (controlled by the GPS NAV button and annunciated by the GPS or NAV indicator),
- manually ‘arm’ and ‘disarm’ a non-precision approach (controlled by the GPS APP button and annunciated by the ARM or ACTV indicator),
- pause the automatic sequencing of waypoints (controlled by the GPS SEQ button and annunciated by the HOLD or AUTO indicator) (Figure 5).
The GPS manufacturer’s pilot guide described the use of the annunciator control panel when conducting a RNAV (GNSS) approach. Included in this guidance in order for the automatic waypoint sequencing to occur required:
- the GPS SEQ button set to AUTO
- the HSI set to the desired final course
- the final approach waypoint as the active waypoint.
The guide required that when the SEQ switch is selected to HOLD and the HSI course is required to be adjusted, the HSI course must be set at least 2 seconds prior to returning the SEQ switch to AUTO. Releasing the SEQ switch from HOLD prior to setting the HSI course would result in the GPS capturing the present HSI setting as the desired course and/or may not give the autopilot sufficient time to react to any required heading change.
RNAV (GNSS) approach design
A landing approach to a runway can be conducted visually in visual meteorological conditions (VMC) and/or by using navigational instruments. However, in weather conditions below that determined for VMC (termed instrument meteorological conditions or IMC), pilots must conduct an instrument approach (Figure 1).
RNAV (GNSS) approaches are a type of non-precision instrument approach used by pilots to position an aircraft close to a runway with the intention to land. They provide pilots with lateral and longitudinal guidance based on a series of waypoints. These waypoints are published latitude and longitude positions in space with no associated ground navigational aid, and are pre-programmed into a GPS receiver in the aircraft.
There is generally more than one choice for the first waypoint (the initial approach fix or IAF), giving pilots a choice of direction to enter the approach, for example, from the south, east, or north, for a final runway approach from the east. As such, there are up to three waypoints published for the initial approach fix. The fifth and only unique letter of the initial approach fix is, for example, either A, B or C. The final four waypoints have the standard fifth letter of I (for intermediate fix or IF), F (for final approach fix or FAF), M (for missed approach point or MAPt) and H (for holding point beyond the runway for when a missed approach is conducted). A MAPt is also published, and is generally 500 m before the runway threshold, however in the case of Mount Hotham, it is 1.6 NM (3 km) from the runway threshold to allow for a steep initial climb requirement to avoid terrain in the event of a missed approach.
During the approach, the RDU in the cockpit displays how far the aircraft is away from the next waypoint in the approach sequence. From that information, pilots must determine what altitude they should be at based on published altitudes given in the approach chart. There is no vertical guidance generated by the RDU.
Conducting an RNAV (GNSS) approach
To operate an RNAV (GNSS) approach, a pilot must first select a pre-programmed approach in the aircraft’s RDU, selecting one of the three initial approach fixes (IAF). Once the approach is selected, the RDU will provide navigation guidance to the IAF and will automatically arm the approach within 30 NM (56 km) of the aerodrome. A course deviation indicator on the RDU and a cockpit HSI displays navigation error to the pilots. Approaching the IAF, the HSI will become more sensitive, making a steady transition from the 5 NM (9 km) to the 1 NM (1.8 km) scale either side of the desired track (Figure 6).
Once the aircraft has passed the IAF, the RDU will display the estimated distance and estimated time to travel to the IF. The desired track between the IAF and IF is shown on the RDU, matching the track shown on the approach chart. The approach chart also shows the desired altitude, or vertical profile, between these waypoints and the sector minimum safe altitude between these waypoints.
Once past the IF, the waypoint indicator displayed on the RDU changes to the FAF, and the estimated distance and time to the FAF is shown on the RDU. From 2 NM (3.7 km) from the FAF, the CDI scale will gradually change from 1 NM (1.8 km) either side of the track to 0.3 NM (600 m) by the time the FAF is reached so the pilot can more accurately track to the runway.
Figure 6: Generic RNAV (GNSS) approach
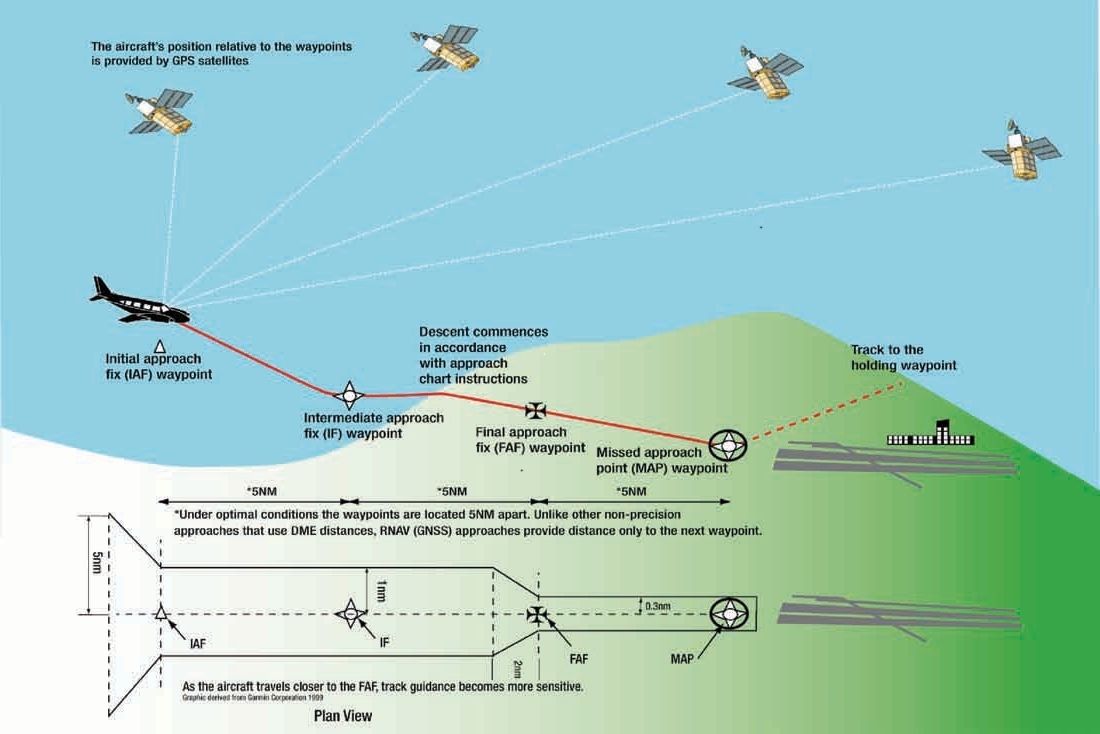
Source: ATSB
As the aircraft approaches the FAF, the same process occurs as for approaching the IF, except the pilot must normally start the descent. Some approaches start the descent before the IF but this is not the case for Mount Hotham. To maintain the appropriate constant angle approach path, the pilot can use the altitude profile in the altitude/distance table on the approach chart for guidance.
Passing the FAF, the RDU waypoint distance changes again, with the distance displayed being referenced to the MAPt. Again, reference altitudes from the approach chart need to be compared with the distance displayed on the RDU to maintain the appropriate descent profile.
Receiver autonomous integrity monitoring
Receiver autonomous integrity monitoring (RAIM) is a technology developed to assess the integrity of GPS signals in a GPS receiver system. It is of special importance in safety-critical GPS applications, such as in aviation or marine navigation. Recorded RAIM data was examined for the period encompassing the occurrence and the representative integrity value was considerably better than that required for the conduct of the RNAV (GNSS) approach. Further to this, other aircraft conducting the approach with similar equipment reported no difficulties or RAIM alerts.
__________
- Ground-based navigation aids involve ground stations which transmit radio signals capable of being received by aircraft equipment for the use establishing aircraft position in relation to the transmitter.
- East Sale airspace: The airspace under the jurisdiction of the Defence controllers became active during the sequence of events. The Airservices controller liaised with their Defence counterpart to obtain clearances for all the aircraft in the Mount Hotham airspace to transit Defence airspace in the event of a missed approach.
- Automatic Dependant Surveillance – Broadcast (ADS-B): a system in which electronic equipment on-board an aircraft automatically broadcasts the precise location of the aircraft via a digital data link. The data can be used by other aircraft and air traffic control to show the aircraft’s position and altitude on display screens without the need for radar. An ADSB system can use the GPS and/or on-board systems to determine an aircraft position. A suitable transmitter then broadcasts that position at rapid intervals, along with identity, altitude, velocity and other data. Dedicated ADS-B grounds stations receive the broadcasts and relay the information to air traffic control for precise tracking of the aircraft.
- Non-precision approaches provide the pilot with lateral and/or longitudinal guidance during the approach and the pilot was responsible for maintaining a minimum predetermined height until passing a specific waypoint.
- Horizontal situation indicator (HSI): A flight instrument used by pilots to determine aircraft heading and positional/angular deviation from a selected radio navigation track or GPSderived track.
- Jeppesen is a division of the Boeing Company that provides products and services pertaining to navigation information and data bases in the support of civilian and military aviation.
Introduction
While attempting to make an approach and landing to Mount Hotham Airport (Mount Hotham) in instrument meteorological conditions, the pilot of VH‑OWN (OWN) experienced difficulty in remaining within tracking tolerances of the prescribed approach and did not follow the missed approach. Consequently, the pilot continued descending when outside of the approach tracking tolerances, and did not follow the prescribed missed approach when finally aborting the approach attempts. This, combined with inaccurate position broadcasts by the pilot of OWN to other aircraft in the area, nearly led to a collision with VH‑LQR (LQR) as that aircraft commenced the approach from the north‑east. During another final approach attempt, and after exiting the cloud layer, the pilot of OWN was observed carrying out significant manoeuvring at low altitude, north of the published approach path in order to line up with the runway and land at Mount Hotham.
The analysis will examine the following:
- any global positioning system (GPS)/autopilot idiosyncrasies that resulted in an unexpected reduction to the level of automation available to the pilot of OWN
- the effects of increased workload on the pilot’s ability to carry out the approach and provide accurate position reporting
- the provision of a traffic information service
- limitations in surveillance coverage and their effect on the ability of the air traffic controller (controller) to provide traffic information and/or traffic alerts in the Mount Hotham area.
Operation of the GPS/autopilot during the approach
The ATSB re-creation of the flight using Airservices Australia (Airservices) and Department of Defence (Defence) radar data showed that on the attempted approaches, OWN did not make the left turn onto the final course at the intermediate fix waypoint HOTEI (EI), and failed to intercept the desired final approach course of 291°. Instead, the aircraft maintained the approximate previous course of 001° used to track from the initial approach fix waypoint HOTEC (EC). This sustained course resulted in the aircraft exceeding the tracking tolerances of the approach and descending below the minimum safe altitude.
During interview, the pilot of OWN stated that in order to reduce workload, he always used the autopilot’s coupling function when conducting area navigation (RNAV) Global Navigation Satellite System (GNSS) approaches. This function automatically varied the aircraft’s heading to intercept and maintain the desired course. The pilot also stated that on approaching the intermediate fix waypoint EI, he received an alert from the GPS to indicate it was time to adjust the course deviation to the final approach course, and this was carried out with the autopilot coupled to the GPS track, and the GPS SEQ control switch continuously in AUTO.
Post-occurrence testing of the GPS/autopilot was hampered by the destruction of the GPS receiver’s removable data card, which stored pertinent waypoint and tracking data for various approaches. This, combined with the absence of a flight data recorder, cockpit voice recorder and further recall from the pilot, limited the opportunity to diagnose or attempt to replicate the occurrence conditions further. Flight testing carried out post occurrence by three separate Civil Aviation Safety Authority (CASA) testing officers in the aircraft did not see a repeat of the reported occurrence scenario.
The recall of events described by the pilot during initial interviews and follow-up questions did not coincide with recorded data from Airservices and Defence, or from other pilots in the area during the occurrence. Several hypotheses were tested regarding the operation of the GPS SEQ control switch and/or the direct-to functions of the GPS/autopilot system, and with statements obtained from other operators that used the same equipment. While some characteristics of the tracking difficulties during the occurrence could only be partially replicated, the investigation determined it was probable that the pilot of OWN experienced difficulties in tracking the final approach course, from the intermediate fix, when using the GPS coupled to the autopilot. Pilot recognition and response to these difficulties is discussed below.
Effects of workload on performance
Single-pilot flight under instrument flight rules, the conduct of the Mount Hotham RNAV (GNSS) approach in poor weather, and dealing with a high level of traffic outside controlled airspace are known to be highly demanding tasks. A combination of these tasks could elevate workload to the point that it adversely effects performance.
Workload has been defined by Orlady & Orlady (1999) as ‘reflecting the interaction between a specific individual and the demands imposed by a particular task. Workload represents the cost incurred by the human operator in achieving a particular level of performance.’ Each individual has a finite set of mental resources which allow them to process information and identify appropriate tasks.
High workload is known to lead to an increased error rate, and has the effect of reducing overall productivity (Harris, 2011). When the workload gets too high for the available set of resources, an individual will start to task shed, initially systematically and eventually randomly as the workload continues to increase. This leads to an overall degradation in performance (Green et al., 1996). Dismukes, Berman & Loukopoulos (2007) identify that this might occur by a pilot moving from a proactive assessment of a situation, commonly referred to in aviation as ‘being ahead of the aircraft’, to a reactive situation, where a pilot responds to events as they occur, without an overall strategy to manage the situation.
Automation is designed to support the human and reduce the mental capacity requirements on the pilot when in use, but cannot eliminate high workload situations from occurring altogether. Even with automation to assist, a pilot’s mental capacity may be reduced to the point that errors in navigation and flight control can still occur (Burian et al., 2013). A common effect of avionics issues in single-pilot, high performance aircraft is a deviation from the planned flight path (Burian, 2007). From this, it is likely that the deviation of flight path from the prescribed missed approach, and subsequent tracking difficulties, was an expected outcome of a high workload following on from the avionics issue.
Additionally, it is known that a reliance on a source of automation (in this case the ability of the aircraft to follow a programmed track with a reduced requirement for pilot input) may lead a pilot to insufficiently monitor the inputs into an automated system in order to reach effective decisions should the automation malfunction (Parasuraman & Riley, 1997). The outcome of doing this may be ’more severe when the automation failures are infrequent, occur for the first time in the operator’s experience and/or occurred after long periods of error-free performance’ (Wickens et al., 2016).
Further to this, the ATSB (2006) had previously surveyed 748 pilots on their experiences and perceptions of RNAV (GNSS) approaches. The survey results showed that, for pilots of category A and B aircraft (such as OWN), the RNAV (GNSS) approach was one of the highest workload approaches in terms of mental workload, physical workload and time pressure. Furthermore, in this study, Mount Hotham was ranked as the most difficult RNAV (GNSS) approach in Australia in terms of number of identified responses per 1,000 commercial movements. Circumstances known to increase the difficulty of an RNAV (GNSS) approach identified as present in this occurrence, include:
- single-pilot operation of a multi-engine aircraft under instrument flight rules
- operating in instrument meteorological conditions with cloud base close to the approach minimum altitude
- unexpected reduction in the level of available automation
- realigning the aircraft after aborting the approach
- a high level of traffic in the vicinity of the airport
- operating outside controlled airspace
- Common Traffic Advisory Frequency (CTAF) and area frequency radio requirements
- use of older or unfamiliar GPS equipment.
The pilot appeared to effectively manage the enroute task demands of the flight and descent into instrument meteorological conditions, up until the point on approach where the aircraft did not turn onto the expected inbound track at EI. From this position and for the rest of the flight, the pilot of OWN identified and reported his workload as ‘high’. The pilot’s desire to climb the aircraft clear of cloud, and his focus on attempting to restore a high level of automation (instead of reverting to hand flying without automation) could be indicative of wanting to lower the workload to a manageable level. At the same time, tracking tolerances for the approach were exceeded, the prescribed missed approach track was not followed, and inaccurate position reports were transmitted by the pilot. The investigation concluded that the pilot’s workload had elevated to a level that affected his ability to follow established tracks and accurately communicate his position to the air traffic controller and the other aircraft in the area.
Deviation from the prescribed missed approach
The regulations pertaining to the conduct of instrument approaches state that a pilot must follow the missed approach procedure specified for the instrument approach flown. For the Mount Hotham RNAV (GNSS), the prescribed missed approach required that, while on climb to the lowest safe altitude of 7,700 ft, aircraft should track towards the missed approach point before conducting a left-hand turn towards the holding waypoint HOTEH (EH), 8.7 NM (16 km) south of the runway.
The pilot of OWN reported to the Airservices’ controller being in the missed approach with the intention of then tracking to the holding waypoint EH. However, Defence radar data and later statements from the pilot of OWN to the ATSB indicated that at no time did the aircraft track via the prescribed missed approach. Instead, after descending to 6,300 ft to the north, OWN climbed in a northerly direction before turning back to the west, then south to bisect the initial and final tracks of the approach.
Due to limited surveillance data for the area, the controller was unable to determine that the pilot’s report of being in the missed approach was incorrect. The controller’s advice to the other traffic inbound for Mount Hotham that OWN was conducting the missed approach was based on the pilot’s report. As that report was erroneous, a false expectations of OWN’s position and intentions was created for the other aircraft in the vicinity, and for the controller.
Given the importance of accurate position reporting in supporting collision avoidance in Class G airspace, the inaccurate position and intention broadcast made by the pilot of OWN increased the risk of collision for other aircraft in the Mount Hotham area.
Provision of a traffic information service
The pilots of OWN and LQR were both operating under instrument flight rules and, as they did not report changing to the CTAF, they were monitoring both the area frequency as well as the CTAF. Consequently, the controller was required to continue to provide both pilots with a traffic information service. Consistent with that controller obligation, at different times, both pilots requested, and were provided with, traffic information and, when available, radar‑derived position information.
The Airservices’ surveillance data was limited in the final phase of approaches into Mount Hotham Airport. However, there were a number of opportunities for the controller to detect the inaccurate position and incorrect tracking reports made by the pilot of OWN:
- the aircraft’s continued tracking in a north‑westerly direction after passing over the waypoint HOTEI (EI) while continuing to descend
- re-acquisition of the aircraft by radar to the east of Mount Hotham 4 minutes after the pilot had reported established in the missed approach, which would have taken the aircraft to the west then south of Mount Hotham
- Despite advising the intention to track towards waypoint HOTEB (EB), the aircraft instead tracked close to EI and then turned towards waypoint HOTEA (EA).
These were all opportunities to query the pilot on the aircraft’s track and the pilot’s intentions. Additionally, even though the actual position for LQR was not displayed to the controller between 0849 and 0854, the controller was aware that the pilot of that aircraft was tracking for EA, on descent to 7,700 ft to commence the approach. There was therefore the opportunity to identify the reducing separation between OWN and LQR.
Due to the size of the area under the controller’s jurisdiction, the scale of the surveillance display being used by the controller and a possible focus on higher priority tasks may have restricted their ability to detect the inaccurate tracking and position reports by the pilot of OWN. Further to this, the controller would not have been aware that the pilot was in instrument meteorological conditions, nor would the controller be aware of any position reports the pilot of OWN was making on the CTAF. Additionally, system warning and alerting functions designed to assist the controller in providing a service, such as the Short-Term Conflict Alert (STCA), were also impeded by the limitations of the surveillance coverage.
The provision of traffic information and alerts by controllers, however, are supplemental to the pilot’s responsibility to ensure separation from other airspace uses and terrain in Class G airspace. Additionally, CASA’s review of the airspace and level of air traffic service in the Mount Hotham area concluded that they were both suitable.
Positive pilot reaction to inconsistent position reports
The pilot of LQR stated that while tracking inbound to waypoint EA and on descent to 7,700 ft, he heard inconsistent position reports from the pilot of OWN on the CTAF. Initially the pilot of LQR believed that OWN was to the west of Mount Hotham and therefore not a traffic conflict. When the pilot of OWN corrected his position to being to the east of Mount Hotham, the pilot of LQR became concerned that there was a potential for a traffic conflict. The pilot of LQR then stopped descent at 8,000 ft and confirmed that both aircraft were using the same barometric setting on their respective altimeters. The pilot of LQR stated that this was not considered a suitable level of separation, but a last line of defence given the sudden threat of traffic conflict that he was presented with.
In uncontrolled airspace, it is a requirement to maintain a minimum of 1,000 ft vertical separation from other aircraft operating in close proximity under instrument meteorological conditions. In accordance with these regulations, for an altimeter to be usable in instrument meteorological conditions it must demonstrate an accuracy of ± 75 ft, but typically errors are, in reality, much smaller. Assuming the maximum allowable error existed in both aircraft, any discrepancy between the altimeters was limited to less than ± 150 ft.
Had the pilot of LQR not reacted to the inconsistent position reports by levelling off before reaching 7,700 ft, the proximity of the two aircraft would have been reduced from a vertical separation of 300 ft, ± 150 ft, to less than ± 150 ft.
From the evidence available, the following findings are made regarding the near-collision between two Beech Aircraft Corp B200 King Air aircraft, registered VH‑OWN and VH‑LQR, and other operational events involving VH‑OWN in the vicinity of Mount Hotham Airport, Victoria, on 3 September 2015. These findings should not be read as apportioning blame or liability to any particular organisation or individual.
Contributing factors
- Due to difficulties with the operation of the GPS and coupled autopilot, VH‑OWN did not turn at the intermediate fix to intercept the final approach course. As these difficulties were not corrected by the pilot, the aircraft deviated outside of the tracking tolerances of the approach, while descending below the lowest safe altitude during each of the multiple approach attempts.
- Due to high workload and difficulties with the operation of GPS/autopilot system, the pilot of VH‑OWN did not broadcast accurate position reports, resulting in reduced separation, and a near-collision, with VH‑LQR.
- The pilot’s ability to follow established tracks and accurately communicate the aircraft’s position was likely adversely affected by experiencing a high workload, due to factors including single-pilot IFR operations while conducting an area navigation (RNAV) Global Navigation Satellite System (GNSS) approach, existing weather minimums and the reduced available flight automation.
- Despite intermittent surveillance coverage in the area of the Mount Hotham Airport, there was sufficient radar data to identify that the pilot of VH‑OWN was having tracking difficulties and that the aircraft was tracking towards the expected position of VH‑LQR. Due possibly to a focus on higher priority tasks, this information was not communicated to the affected pilots contrary to the intent of the traffic information service they were receiving.
Other factors that increased risk
- The pilot of VH‑OWN did not track via the prescribed missed approach and prescribed holding pattern when experiencing global positioning system (GPS)/autopilot difficulties, and did not communicate this to the air traffic controller or the other traffic in the area. This increased the risk of a collision.
- Airservices Australia’s surveillance coverage of the Class G airspace in the area to the north of the Mount Hotham Airport was limited. This negated protections such as automated system warnings and alerts, for example Short Term Conflict Alerts to warn the air traffic controller of traffic situations that could result in collisions.
Other findings
- After detecting inconsistencies in the position reports from the pilot of VH‑OWN, the pilot of VH‑LQR stopped his descent at 8,000 ft. As a result, the separation between the aircraft was around 300 ft, ± 150 ft, and a collision was likely avoided.
Sources of information
The sources of information during the investigation included the:
- Beech Aircraft Corp B200 Pilot Operating Manual
- Garmin TSO 155XL GPS Pilot Guide
- Civil Aviation Safety Authority Manual of Standards Part 139
- Aeronautical Information Publication Australia
- Airservices Australia
- Department of Defence
- pilots of VH‑OWN, VH‑LQR and the other aircraft operating in the Mount Hotham area
- Mount Hotham Airport operator.
References
ATSB (2006) Perceived Pilot Workload and Perceived Safety of RNAV (GNSS) Approaches. (20050342). Australian Transport Safety Bureau, Canberra.
Dismukes, R.K., Berman, B.A., and Loukopoulos, L.D., (2007). The Limits of Expertise, Rethinking Pilot Error and the Causes of Airline Accidents. Ashgate, UK.
Burian, B.K., (2007) Very light jets in the national airspace system. In Proceedings of the 14th International Symposium on Aviation Psychology. Wright State University, Ohio.
Burian, B.K., Pruchnicki, S., Rogers, J., Christopher, B., Williams, K., Silverman, E., Drechsler, G., Mead, A., Hackworth, C., Runnels, B., (2013) Single-Pilot Workload Management in Entry-Level Jets. Study: 09-AJP61FGI-0048. Federal Aviation Administration & NASA Ames Research Centre, USA.
Green, R.G., Muir, H., James, M., Gradwell, D., Green, R.L., (1996) Human Factors for Pilots. Second Edition. Ashgate, UK.
Harris D., (2011) Human Performance on the Flight Deck. Ashgate, UK.
Orlady, H.W., and Orlady, L.M., (1999) Human Factors in Multi-Crew Flight Operations. Ashgate, UK.
Parasuraman, R., and Riley, V., (1997) Humans and Automation: Use, Misuse, Disuse, Abuse. Human Factors, June 1997 39(2), 230-253.
Wickens, C.D., Hollands, J.G., Banbury, S., Parasuraman, R., (2016) Engineering Psychology and Human Performance. Fourth Edition. Routledge, UK.
Submissions
Under Part 4, Division 2 (Investigation Reports), Section 26 of the Transport Safety Investigation Act 2003 (the Act), the Australian Transport Safety Bureau (ATSB) may provide a draft report, on a confidential basis, to any person whom the ATSB considers appropriate. Section 26 (1) (a) of the Act allows a person receiving a draft report to make submissions to the ATSB about the draft report.
A draft of this report was provided to a next of kin representative of the pilot of VH‑OWN, the pilot of VH‑LQR, Airservices Australia, the Department of Defence and the Civil Aviation Safety Authority.
Submissions were received from the Civil Aviation Safety Authority, Airservices Australia and the Department of Defence. The submissions were reviewed and, where considered appropriate, the text of the report was amended accordingly.
Purpose of safety investigationsThe objective of a safety investigation is to enhance transport safety. This is done through:
It is not a function of the ATSB to apportion blame or provide a means for determining liability. At the same time, an investigation report must include factual material of sufficient weight to support the analysis and findings. At all times the ATSB endeavours to balance the use of material that could imply adverse comment with the need to properly explain what happened, and why, in a fair and unbiased manner. The ATSB does not investigate for the purpose of taking administrative, regulatory or criminal action. TerminologyAn explanation of terminology used in ATSB investigation reports is available here. This includes terms such as occurrence, contributing factor, other factor that increased risk, and safety issue. Publishing informationReleased in accordance with section 25 of the Transport Safety Investigation Act 2003 Published by: Australian Transport Safety Bureau © Commonwealth of Australia 2018
Ownership of intellectual property rights in this publication Unless otherwise noted, copyright (and any other intellectual property rights, if any) in this report publication is owned by the Commonwealth of Australia. Creative Commons licence With the exception of the Coat of Arms, ATSB logo, and photos and graphics in which a third party holds copyright, this publication is licensed under a Creative Commons Attribution 3.0 Australia licence. Creative Commons Attribution 3.0 Australia Licence is a standard form licence agreement that allows you to copy, distribute, transmit and adapt this publication provided that you attribute the work. The ATSB’s preference is that you attribute this publication (and any material sourced from it) using the following wording: Source: Australian Transport Safety Bureau Copyright in material obtained from other agencies, private individuals or organisations, belongs to those agencies, individuals or organisations. Where you wish to use their material, you will need to contact them directly. |